


| 25 x Grados de libertad retroalimentados. |
|
|
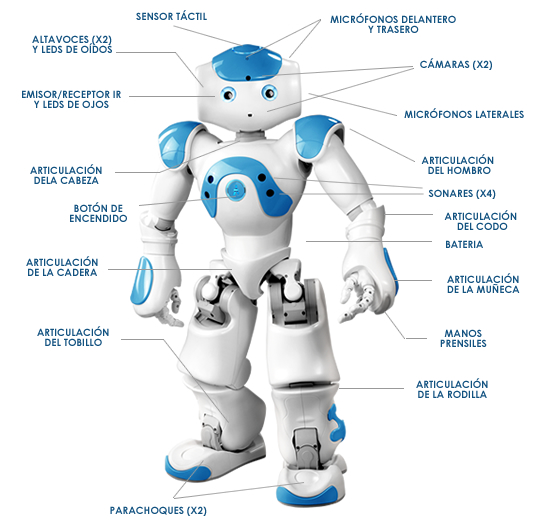
| 2 x Sensores Ultrasónicos | ||
| 1 x Unidad Inercial (Acelerómetro de 3 ejes y Giroscopio de 2 ejes). | ||
| 4 x Micrófonos para reconocimiento de sonidos y voz. | ||
| 2 x Cámaras HD. | ||
| 9 x Sensores Capacitivos. | ||
| 8 x Sensores Resistivos de Presión. | ||
| Comunicación por Infrarrojo, Wi-Fi, Ethernet y Bluetooth. | ||
| Caminado omnidireccional y capacidad de manipular objetos. | ||
| Programación en C++, Python, Visual Basic, entre otros. | ||
| Plataforma de software abierta, con documentación completa sobre dimensiones, pesos, centros de masa y tensor de inercias para cada eslabón del sistema (útil para la obtención de modelos cinemáticos y dinámicos). |
La plataforma es completamente programable y gracias a la minicomputadora incorporada en el robot, éste puede ser completamente autónomo. Cabe mencionar que el código disponible es “Open-Source” por lo que el estudiante o investigador tiene acceso a todos los módulos existentes, puede manipularlos, mejorarlos o crear sus propios módulos o rutinas. El sistema robótico incluye una suite completa de programación que incluye un entorno de programación, un simulador de comportamientos 3D y una aplicación de monitoreo. Además cuenta con un Paquete de Desarrollo de Software (SDK) que habilita al usuario a programar en el entorno de programación de su preferencia, ya sea en los lenguajes de programación URBI, C, C++, Python, o .NET.
 ALDEBARAN ROBOTICS
ALDEBARAN ROBOTICS 2012 (C) GRUPO MEDIATEC, S.A. de C.V. Río Pánuco No. 173 Col. Cuauhtémoc
C.P. 06500, México, D.F. Teléfono: 01 (55) 55 11 44 55